齒輪傳動作為一種嚙合性能良好的傳動機(jī)構(gòu),在礦山機(jī)械領(lǐng)域應(yīng)用廣泛。但礦用機(jī)械設(shè)備齒輪齒面的復(fù)雜接觸關(guān)系會造成輪齒的點(diǎn)蝕、膠合甚至折斷,導(dǎo)致齒輪失效和報廢,其都與齒輪接觸應(yīng)力和彎曲應(yīng)力的變化過程有關(guān)。而傳統(tǒng)的齒面接觸應(yīng)力計(jì)算利用球接觸或圓柱體接觸理論,輪齒彎曲強(qiáng)度的計(jì)算是運(yùn)用平板接觸理論或 30° 切線法,都只是靜態(tài)下的強(qiáng)度校核,不能夠完全反應(yīng)嚙合齒輪動態(tài)狀況下的應(yīng)力變化過程。有限元方法可以在動態(tài)因素的情況下對齒輪的嚙合全過程進(jìn)行模擬,還可以迅速獲得齒輪接觸應(yīng)力和齒根彎曲應(yīng)力的變化過程,提高齒輪接觸應(yīng)力和齒根彎曲應(yīng)力的計(jì)算精度與效率。
本文采用 Creo2.0 軟件建立了某礦用直齒齒輪的三維參數(shù)化模型,并利用 ABAQUS 軟件中子模型技術(shù)對齒輪嚙合處的接觸應(yīng)力和齒根處的彎曲應(yīng)力進(jìn)行詳細(xì)分析,為實(shí)現(xiàn)齒輪參數(shù)化、系列化設(shè)計(jì)提供一種新方法。
一、齒輪參數(shù)化設(shè)計(jì)
Creo2.0 是一種應(yīng)用于 CAD/CAE/CAM 的軟件。基于 Creo 的齒輪參數(shù)化設(shè)計(jì)是采用幾何建模、數(shù)學(xué)方程及關(guān)系控制來實(shí)現(xiàn)的。
(1)漸開線直齒圓柱齒輪是一種應(yīng)用比較廣泛的齒輪,其建模過程中主要考慮的因素有模數(shù) m、齒數(shù) z、壓力角 α、齒寬 b、齒頂高系數(shù) ha* 、頂隙系數(shù) c* 、變位系數(shù) x。
(2)通過已知參數(shù)可確定其他幾何參數(shù)。設(shè) d 為分度圓直徑,da 為齒頂圓直徑,db 為基圓直徑,df 為齒根圓直徑,ha 為齒頂高,hf 為齒根高。各參數(shù)關(guān)系式
(3)通過幾何參數(shù)建立模型的特征參數(shù),從而形成完整的齒輪幾何模型。設(shè) θ 為漸開線展開角,t 為 0~1 的一個變量,r 為基圓半徑,x、y、z 分別為 X、Y、 Z 軸的值。笛卡爾坐標(biāo)系中漸開線方程為
在 Creo 中輸入?yún)?shù)可以生成大、小齒輪,并對大、小齒輪采用銷釘約束方式裝配,保存為.stp 格式,導(dǎo)入 ABAQUS 中。
二、齒輪嚙合有限元分析
(1)材料參數(shù)
選用材料均為 40Cr 的大、小嚙合齒輪為研究對象,設(shè)置彈性模量 206 GPa、泊松比 0.3、密度 7.9× 10-9 t/mm3 。
(2)齒輪參數(shù)及工況設(shè)置
大、小齒輪的基本參數(shù):
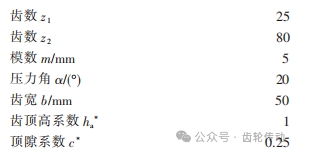
相嚙合的齒輪工況為:小齒輪為主動輪,大齒輪為從動輪;輸入功率為 27.7 kW,主動輪轉(zhuǎn)速 311 r/min,從動齒輪所受扭矩 820 N·m,工作壽命 1 000 h,傳動比 3.2;齒輪結(jié)合采用“面—面”接觸,小齒輪為主面,大齒輪為從面;對大、小齒輪參考點(diǎn)約束 5 個方向的自由度(U1=U2=U3=UR1=UR2=0),小齒輪參考點(diǎn) 施加旋轉(zhuǎn)速度 VR3=32.55 rad/s,大齒輪參考點(diǎn)施加沿 Z 軸的扭矩 820 N·m,并分別對大、小齒輪參考點(diǎn)與大、小齒輪內(nèi)圈進(jìn)行耦合。
(3)有限元模型
利用顯式非線性動力有限元分析軟件 ABAQUS/ Explicit 進(jìn)行三維動力接觸有限元分析。為了準(zhǔn)確獲得齒輪接觸應(yīng)力,輪齒模型部分需要較細(xì)的有限元網(wǎng)格,而且考慮到加速度和轉(zhuǎn)動慣量的影響,在仿真過程中需要運(yùn)用全齒模型,但會造成整個齒輪的單元數(shù)過多,計(jì)算時間過長。為了保證精度且節(jié)約計(jì)算成本,本文采用子模型技術(shù),即截取 5 齒模型來計(jì)算接觸應(yīng)力和彎曲應(yīng)力的變化,對子模型采用 6 面體單元(C3D8R)進(jìn)行網(wǎng)格細(xì)化。
三、仿真計(jì)算結(jié)果分析
(1)接觸應(yīng)力計(jì)算結(jié)果分析
①齒輪在嚙合過程進(jìn)行三維顯示非線性動力有限元分析,接觸應(yīng)力分布變化過程如圖 1 所示。
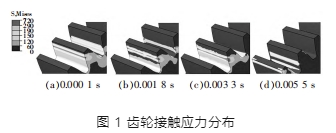
由圖 1 可知,當(dāng)齒輪進(jìn)入嚙合狀態(tài)時,輪齒在單齒嚙合和雙齒嚙合之變換。在雙齒嚙合狀態(tài)傳動時,齒輪之間的接觸應(yīng)力值較小;當(dāng)單齒嚙合狀態(tài)傳動時,齒輪之間的接觸應(yīng)力值較大。在雙齒嚙合狀態(tài)下傳動時,由于 2 個齒牙之間載荷分布是變化的,中間的齒隨著傳動方向逐漸成為承載齒輪,其接觸應(yīng)力隨之升高,當(dāng)后 1 對輪齒進(jìn)入嚙合后,接觸應(yīng)力隨之降低。
②齒輪嚙合中的 1 對輪齒嚙合過程進(jìn)行三維顯式非線性動力有限元分析,接觸應(yīng)力變化曲線變化曲線如圖 2 所示。
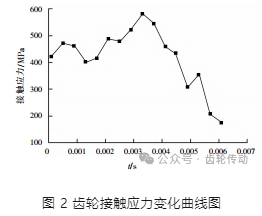
由圖 2 可知,在單、雙齒輪交替嚙合處,單齒接觸應(yīng)力相對于雙齒嚙合應(yīng)力變化較大;在雙齒嚙合區(qū),輪齒的最大接觸應(yīng)力相對比較平穩(wěn),該現(xiàn)象說明雙齒嚙合區(qū)的嚙合沖擊力相對較小。
③1 對齒輪在嚙合狀態(tài)下進(jìn)行三維顯示非線性動力有限元分析,嚙合面的接觸應(yīng)力最大值如圖 3 所示。
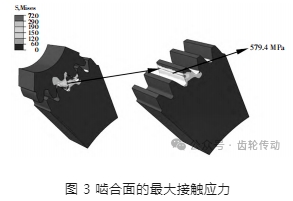
由圖 3 可知,該嚙合齒輪的最大接觸應(yīng)力出現(xiàn)在節(jié)圓附近單齒嚙合區(qū),最大接觸應(yīng)力 579.4 MPa。
(2)齒根彎曲應(yīng)力計(jì)算結(jié)果分析
①齒輪嚙合中的 1 對輪齒嚙合過程進(jìn)行三維顯式非線性動力有限元分析,得到齒根彎曲應(yīng)力分布變化過程如圖 4 所示,彎曲應(yīng)力變化曲線如圖 5 所示。
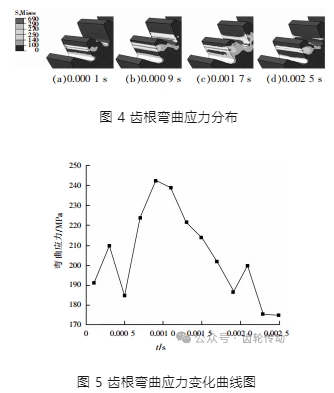
由圖 4 和圖 5 可知,隨著嚙合點(diǎn)從齒頂向齒根移動,輪齒的齒根彎曲應(yīng)力逐漸升高,在輪齒上界點(diǎn)附近,齒根彎曲應(yīng)力達(dá)到最大,然后逐漸下降,并隨著 1 對齒輪和 2 對齒輪的嚙合狀態(tài)周期性變化而產(chǎn)生波動。在輪齒離開嚙合時,齒根彎曲應(yīng)力迅速降低。
②1 對齒輪在嚙合狀態(tài)下進(jìn)行三維顯示非線性動力有限元分析,得到齒輪齒根彎曲應(yīng)力最大值的嚙合位置,如圖 6 所示。

由圖 6 可知,齒輪齒根最大彎曲應(yīng)力出現(xiàn)在大齒輪上界點(diǎn)附近,最大彎曲應(yīng)力 242.1 MPa。
四、接觸應(yīng)力和彎曲應(yīng)力理論計(jì)算
(1)齒輪接觸應(yīng)力計(jì)算
接觸應(yīng)力計(jì)算公式以兩曲面赫茲接觸應(yīng)力公式為基礎(chǔ)。載荷系數(shù)
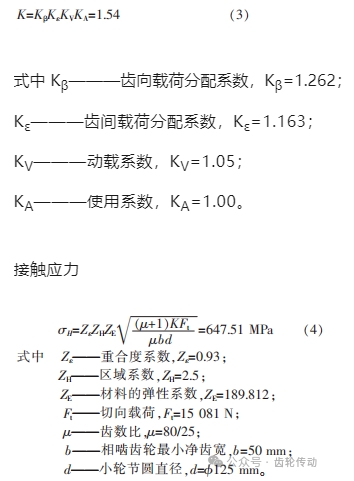
有限元計(jì)算出齒輪最大接觸應(yīng)力 579.4 MPa,理論計(jì)算結(jié)果為 647.51 MPa,說明了有限元模型計(jì)算的正確性,赫茲理論計(jì)算偏向于保守。
(2)齒輪彎曲應(yīng)力計(jì)算
齒輪的彎曲應(yīng)力與齒輪齒根過渡圓弧處及齒輪危險截面抗斷裂的能力有關(guān)。標(biāo)準(zhǔn)的彎曲應(yīng)力計(jì)算基于平板理論,即按全部載荷作用于 1 對齒嚙合區(qū)齒頂時,直齒輪齒根最大彎曲應(yīng)力

有限元計(jì)算齒輪齒根最大彎曲應(yīng)力為 242.1 MPa,由平板理論計(jì)算結(jié)果為 227.67 MPa,說明了有限元模型計(jì)算的正確性。
五、結(jié)語
(1)在齒輪嚙合過程中,最大接觸應(yīng)力出現(xiàn)在單齒嚙合區(qū)節(jié)圓附近,最大彎曲應(yīng)力出現(xiàn)在嚙合區(qū)上界點(diǎn),最大接觸應(yīng)力和最大彎曲應(yīng)力與理論計(jì)算結(jié)果相近;
(2)齒輪單齒嚙合和雙齒嚙合過程中輪齒的接觸應(yīng)力值是起伏變化的,單齒嚙合較雙齒嚙合接觸應(yīng)力有所增加;
(3)在單、雙齒交替嚙合處,單齒接觸應(yīng)力較雙齒嚙合應(yīng)力變化較大,當(dāng)齒輪進(jìn)入到雙齒嚙合區(qū)域時,其最大接觸應(yīng)力運(yùn)行較為平穩(wěn),嚙合沖擊不大。
參考文獻(xiàn)略.